Finding the Shortest Path: A Simple Step-by-Step Guide
geospatial
map
Optimization
Introduction
Navigating a city efficiently—whether on foot, by bike, or by car—often comes down to finding the shortest and most optimal route. Using graph-based mapping techniques, we can calculate the best path between two locations based on real-world road networks. Here’s how the process works in three simple steps:
- Download and Create a Graph of the Area 🗺️
- Find the Nearest Nodes to Start and End Points 📍
- Compute the Shortest Path 🏁
The result? A clear, optimized path from origin to destination, ready to be visualized on a map or used for navigation. 🚀
The Code
By calling maps.shortest_path, we can do all steps above, from retrive graph of specific area, find the Nearest Nodes to Start and End Points, and generate shortest path.
path, graph = maps.shortest_path(location='Manhattan, New York, USA',
origin_coords=[40.7295, -73.9965],
destination_coords=[40.8075,-73.9626], network_type='drive', method='dijkstra')
This function requires the following parameters:
- location (
string): location name - origin_coords (
list): coordinate of origin point - destination_coords (
list): coordinate of destination point - network_type (
string): What type of street network to retrieve[“all”, “all_public”, “bike”, “drive”, “drive_service”, “walk”] - method (
string): The algorithm to use to compute the path.[“dijkstra”, “bellman-ford”]
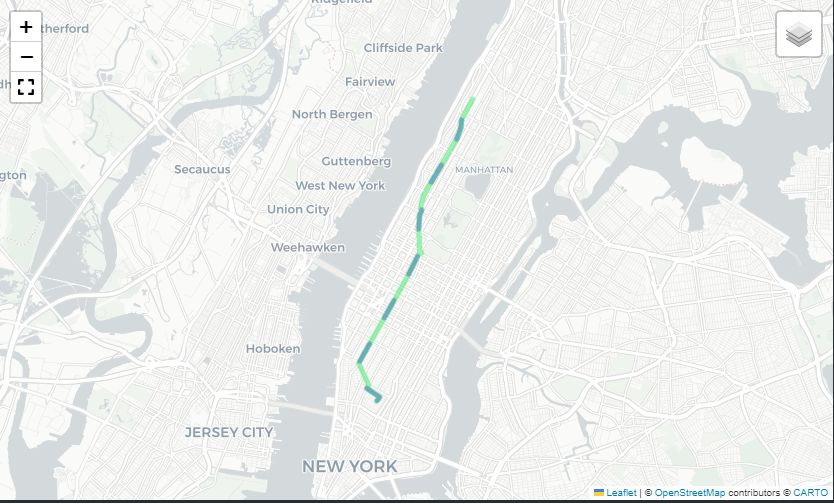
The result
| origin_coords | destination_coords | geometry | |
|---|---|---|---|
| 0 | [40.7295, -73.9965] | [40.8075, -73.9626] | [(40.7295644, -73.9965723), (40.7301561, -73.9960614), (40.730721, -73.9955665), ] |
This process powers everything from GPS navigation apps to smart city planning, helping users move around more efficiently while making data-driven decisions about urban mobility.